DRIVER L293D para Arduino - Control de motores de corriente continua

Control de un motor de corriente continua - Explicaciones Blog de Ángel
CONTROL DE DOS MOTORES DE CORRIENTE CONTINUA
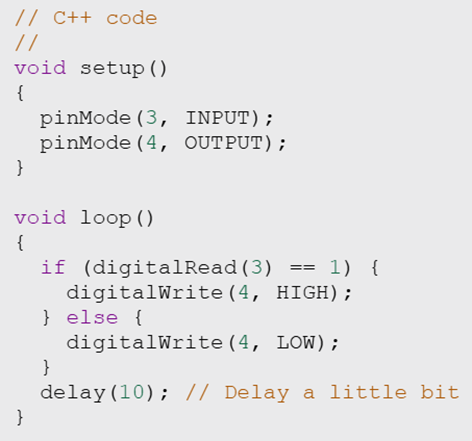
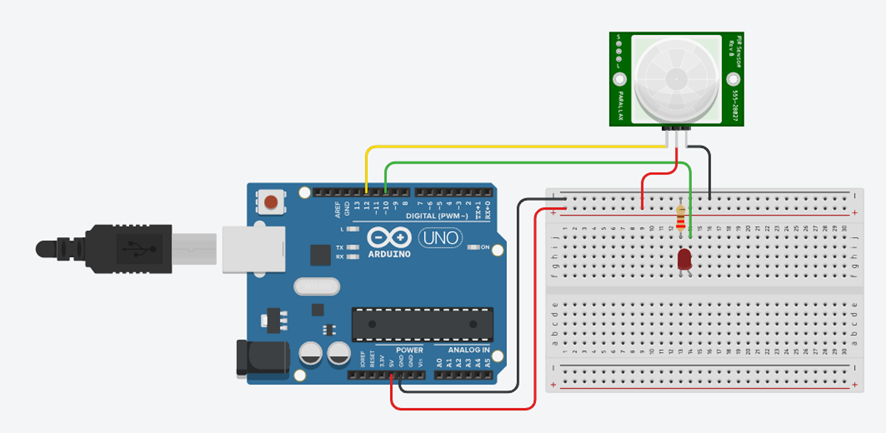
Simulación en Tinkercad:

Observa estas tablas para entender el funcionamiento:

Según el comportamiento de los motores el coche tendrá los siguientes movimientos:

Teniendo todo esto en cuenta, prueba a simular un código para que el coche realice un cuadrado
Pistas

En el siguiente enlace tienes una hoja con el código para el IDE de Arduino y los Bloques de Tinkercad, pero inténtalo tu solo. Vete paso a paso y vete probando a ver cómo se mueven los motores.

Vídeo 1: Cómo usar el driver L293D con Arduino